Cíl projektu č.2 (Bludiště)
Postavit a naprogramovat robota tak, aby samostatně, bez jakékoli další pomoci projel co nejrychleji bludištěm od jeho počátku až na jeho konec.
Vybavení
Každý tým obdrží na začátku semestru základní soupravu LEGO® MINDSTORMS® Education (9797), soupravu technických dílů (9648 - doplňkové pasivní díly) a síťový adaptér (9833), které po skončení semestru (nejpozději však do 18.1.2010) vrátí v kompletním stavu na Katedře řídicí techniky nebo Katedře měření. Při odevzdání bude NXT kostka bude obsahovat standardní firmware LEGO MINDSTORMS!
NXT kostku lze programovat v libovolném programovacím jazyce. Při programování NXT kostky a testování robota lze využít k napájení akumulátor, vlastní baterie nebo síťový adaptér. Při vlastní soutěži je možné použít pouze akumulátor nebo baterie!
Bludiště
Podrobnosti k průjezdu bludištěm
Vlastního robota, lze sestavit naprosto libovolně, ovšem pouze s využitím dílů ze zapůjčených souprav. Tento robot by měl zcela samostatně a co možná nejrychleji projet bludiště ze stanoveného startovního prostoru (STARTU) do stanoveného cílového prostoru (CÍLE) na základě předem stanovené strategie řízení (skupině se nebude počítat čas, pokud bude z trajektorie průjezdu bludištěm robota zřejmé, že není použita žádná strategie řízení).
Robota lze položit do startovního prostoru (cca 40 x 40 cm) ručně. Dále již musí pokračovat samostatně bez jakékoliv dodatečné korekce (např. akustické, atp.) Měří se čas od okamžiku kdy robot poprvé protne startovací linii (paprsek světelné závory). Do chvíle, kdy robot poprvé projede cílovou linií (paprskem světelné závory v cílové prostoru (cca 40 x 40 cm)).
Rozměry bludiště
Každý robot musí bludištěm projet od začátku do konce zcela samostatně (bez jakékoliv pomoci a jeho ovládání, např. externě přes bluetooth nebo hlasovými povely). V případě porušení pravidel je tým okamžitě vyloučen ze soutěže.
Minimální vzdálenost mezi dvěma libovolnými stěnami je vždycky cca 40 cm. Všechny stěny bludiště stojí kolmo ke dnu, tzn. že se tam nevyskytují žádné nakloněné stěny. Jsou rovné (přímkové) a nevyskytují se u nich žádná nepředpokládaná zahnutí. Jejich výška je cca 28 cm.
Obě dvě světelné závory jsou umístěny 5 cm od podkladu bludiště a vyčnívají cca 1cm ze stěn dovnitř vlastní dráhy, takže šířka je na začátku i na konci bludiště 38cm.
Celkový rozměr bludiště bude 330 x 160 cm a podkladem bude:
1) lino při soutěži po jednotlivých skupinách (viz strojovna KN:E-s109 na Karlově náměstí na Fakultě Elektrotechnické, ČVUT v Praze).
2) dřevěné parkety při finálové soutěži (viz Zengerova posluchárna KN:E-107 na Karlově náměstí na Fakultě Elektrotechnické, ČVUT v Praze).
Uspořádání bludiště
Obrázek
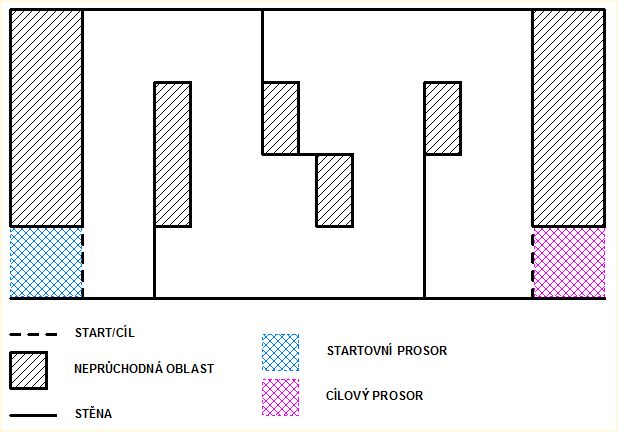
Níže uvedený soutěžní plán je pouze jeden z možných příkladů jeho uspořádání pro vlastní soutěž. Může dojít jak ke změně polohy startovací a cílové oblasti, tak i ke změně uspořádání čáry.
Obrázek

Průjezd bludištěm
Robot může bludištěm projet libovolným způsobem (počítá se pouze celkový čas průjezdu). Bludiště je postavené tak, aby nejkratší cesta mezi startovacím a cílovým prostorem nikdy nevedla zpět ke startovací linii.
Průjezd vede stále k cílovému prostoru. Volba senzorů a strategie průjezdu závisí pouze na jednotlivých týmech. Při orientaci v bludišti se roboti samozřejmě smějí dotýkat stěn.
Vlastní soutěž
Vlastní soutěž bude probíhat dvoukolově (výsledkem bude lepší čas z obou kol). Jednu hodinu před začátkem soutěže bude umožněno týmům testovat robota na variantě stejného bludiště, jaké bude použito pro vlastní soutěž. V tomto čase však není dovoleno provádět jakékoliv měření jeho rozměrů.
Mezi oběma koly je možné vyměnit (nebo dobít) akumulátor či baterie a je také přípustné provést případné změny, opravy či úpravy softwaru.