Cíl projektu (Balancování s míčkem)
Cílem úlohy je sestavit a naprogramovat robot s plošinkou tak, aby samostatně bez jakékoliv další pomoci (ovládání robota pomocí hlasu, bluetooth či jiných komunikačních kanálů není dovoleno) převezl co nejrychleji tam zpět po nerovné dráze míček umístěný na plošince. Míček při tom nesmí z plošinky spadnout ani se dotknout jiné části robota.
Vybavení pro řešení úlohy
Každý tým obdrží základní soupravu LEGO® MINDSTORMS® Education (9797), soupravu technických dílů (9648 - doplňkové pasivní díly), síťový adaptér (9833) a gyroskopický senzor (1044), které po skončení semestru (nejpozději však do 27.1.2012) vrátí v kompletním stavu (pokud možno přerovnané stavebnice podle vyobrazených dílů na jednotlivých kartách) na Katedře řídicí techniky nebo Katedře měření (podle toho, na které katedře mu byly zapůjčeny). Při odevzdání bude NXT kostka obsahovat standardní firmware LEGO MINDSTORMS!
Konstrukce robota
Ke konstrukci robota lze využít pouze dílů z výše uvedených stavebnic. Za díly z dané sady lze považovat pouze takové díly, které jsou uvedeny na seznamu obsahu příslušné sady. Každý robot smí být sestaven z dílů obsažených právě v jedné sadě 9797 a jedné sadě 9648 nebo 9695. Použití vázacích pásků a obalů, v níž jsou sady dodávány, není přípustné. Díly stavebnice mohou držet pohromadě pouze pomocí standardních spojovacích prvků LEGO.
Rozměry robota jsou dány rozměrem jednotlivých segmentů dráhy. Robot by neměl mít větší půdorys než 30 x 40cm (délka x šířka). Maximální výška robota není omezena, ale jeho minimální výška je dána minimální výškou pro umístění plošinky tj. 18cm. Za žádných okolností není přípustné vybavit robot zařízením zajišťujícím předčasné protnutí cílové čáry za cenu změny jeho půdorysu, který měl na startu.
UPOZORNĚNÍ: Použití lepidel, šroubů a jiných spojovacích materiálů není povoleno.
Plošinka
Součástí konstrukce robota je plošinka, na níž bude umístěn převážený míček. Plošinka může být (pravděpodobně musí být) nakláněna. Plošinka musí být umístěna v minimální výšce 18cm od podložky po níž se robot pohybuje (dráhy). Vzdálenost bude měřena na robotovi umístěném na vodorovné dráze a to s plošinkou ve vodorovné poloze. Plocha pro umístění míčku bude při měření nahoře. Výška plošinky bude měřena od povrchu dráhy k hornímu povrchu plošinky (určena položením např. pravítka na plošinku). Provedení plošinky je zachyceno na obrázku 1.
Pro stavbu plošinky je k dispozici návod na sestavení. Konstrukci je možné měnit, ale je nutné přesně dodržet tvar, materiál a rozměr plochy plošinky pro umístění míčku. V případě nedodržení požadovaných vlastností plošinky nebude tým připuštěn do soutěže, či může být i dodatečně diskvalifikován.
Obrázek

Obrázek 1 Provedení plošinky pro balancování míčku
Programování robota
V rámci řešeného úkolu a soutěže je povoleno využít libovolného programovacího jazyka k naprogramovaní NXT kostky (řídicí jednotka LEGO® MINDSTORMS®). Při programování NXT kostky a testování robota lze využít k napájení akumulátor, vlastní baterie nebo síťový adaptér. Při vlastní soutěži je možné použít pouze akumulátor nebo baterie!
Soutěžní dráha
Soutěžní dráha je přímá, ale má nerovný povrch. Povrch klesá a stoupá pod různým úhlem, ale vždy ve směru osy dráhy. Celková délka dráhy, kterou bude robot projíždět je 4,2m a šířka 40cm. Dráha se skládá z jednotlivých unifikovaných segmentů o půdorysu 30x40cm (délka x šířka). Jeden z možných příkladů sestavení dráhy je na obrázku 2. Přehled všech dostupných typů segmentů a jejich orientačních rozměrů dává obrázek 3. Jednotlivé segmenty jsou vyrobeny z umělé hmoty (PSH deska – houževnatý polystyrén tloušťky 5mm) s hladkým nelesklým povrchem (viz fotografie na obrázku 4.).
Obrázek
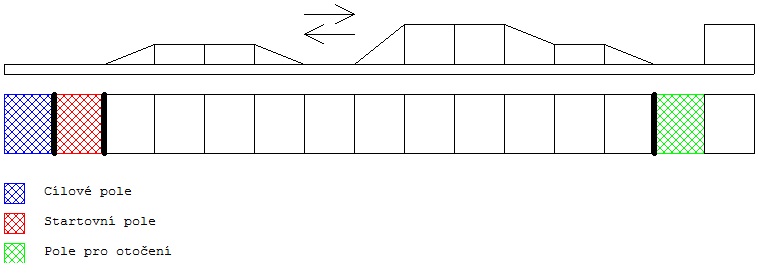
Obrázek 2 Jedno z možných uspořádání dráhy
Obrázek
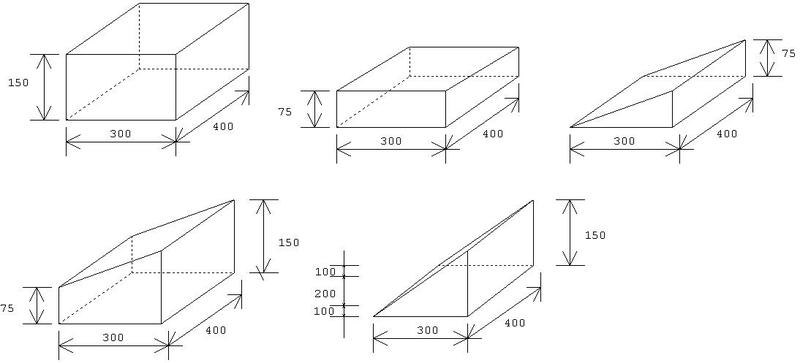
Obrázek 3 Typické moduly z nichž bude sestavena dráha
Obrázek
 Obrázek
Obrázek

Obrázek
 Obrázek
Obrázek

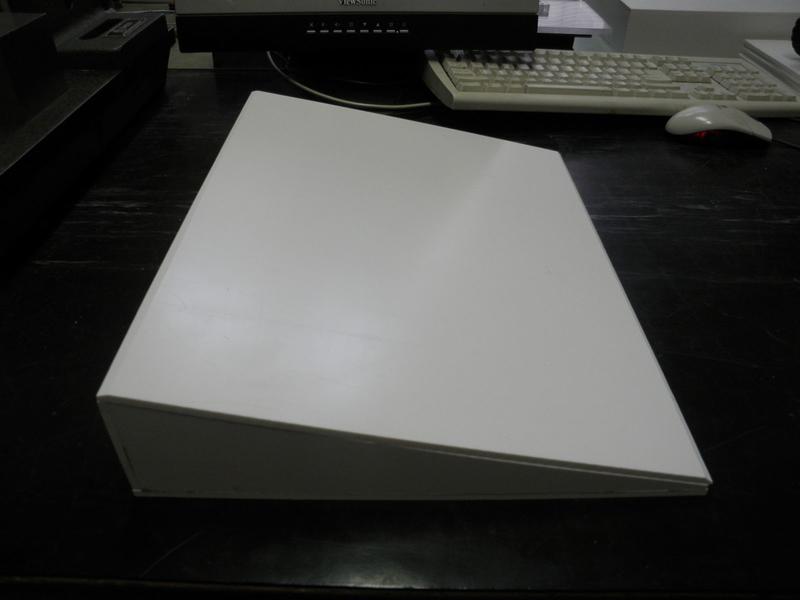
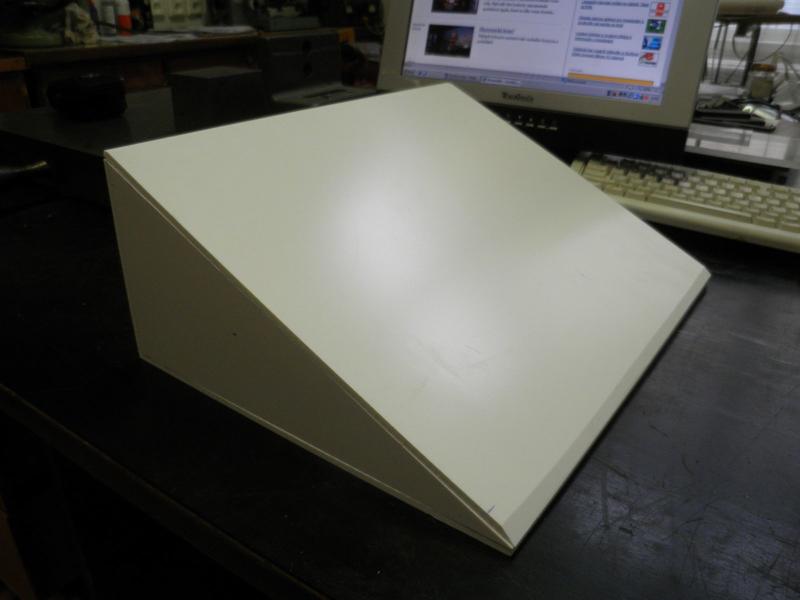
Obrázek 4 Typické moduly z nichž bude sestavena dráha (fotografie)
Podkladem dráhy, na nějž budou umístěny jednotlivé segmenty, je laminátová deska o rozměrech 4500 x 400 x 18 mm ohraněná bočními lištami s výškou 27mm. Dráha je ukončena na jednom konci kolmou stěnou, jejíž výška je minimálně 120 mm. Tato stěna umožní robotu detekovat konec dráhy a vrátit se na začátek.
Na začátku dráhy bude vyznačeno cílové pole, tvořené plochou odpovídající jednomu segmentu dráhy. Toto pole bude následované stejně velkým startovním polem, do kterého musí být umístěn robot před startem (viz obrázek 2). Obě tato pole budou ve stejné výšce a jejich povrch bude vodorovný. Na druhém konci dráhy (před svislou stěnou) bude v ploše jednoho segmentu vyznačeno pole pro možné otočení (změnu směru jízdy, robot se otočit nemusí). Dráha v tomto poli bude také vodorovná a ve výšce takové, aby svislá stěna sahala minimálně 120mm nad povrch dráhy v tomto poli. Pole budou na dráze vyznačena příčnými čarami.
Dráha může být sestavena z libovolného počtu segmentů libovolného z uvedených typů. Pokud na dráze nebude umístěn žádný segment, dráha samotná bude vodorovná. Při sestavování dráhy budou dodržena tato omezení:
- Maximální úhel stoupání a klesání je 30 stupňů
- Maximální změna sklonu mezi dvěma po sobě následujícími segmenty je 30 stupňů
- Na začátku dráhy jsou alespoň dva segmenty (60cm) vodorovné a na konci dráhy jeden alespoň jeden vodorovný segment
Průjezd robotu zvlněnou drahou
Úkolem robota je projet co nejrychleji připravenou dráhu a přitom převézt na plošince předepsaného tvaru umístěný míček. Na začátku soutěžící umístí robota do startovního pole a spustí ho. Robot musí poté zcela samostatně projet dráhu jedním směrem, až dosáhne pole pro otáčení na konci dráhy. Z tohoto pole bude pokračovat zpět a dráhu projede opačným směrem. Robot projede opět startovním polem a dosáhne pole cílového na začátku dráhy. Robot se po zahájení soutěžní jízdy musí pohybovat samostatně, ovládání robota pomocí hlasu, bluetooth či jiných komunikačních kanálů není dovoleno. V případě porušení pravidel je tým okamžitě vyloučen ze soutěže.
Po celou dobu jízdy robot veze na plošince míček. Míček se smí dotýkat pouze plošinky (přidržení není povoleno) a nesmí po celou dobu jízdy spadnout. V soutěži bude využit míček (4156530 (červený) nebo 4100758 (modrý)) ze základní soupravy LEGO® MINDSTORMS® Education (9797). Míček umístí na plošinku soutěžící. Míček nesmí být nijak upravován, namáčen, zatěžován ani lepen. Pro zajištění stejných podmínek soutěžních týmů bude pro soutěž použit jeden míček, s nímž pojedou všichni roboti v daném kole.
Před začátkem jízdy musí být robot celým svým objemem umístěn ve startovním poli a žádná jeho část nesmí přesahovat hranici tohoto pole. Pro tyto účely se hranicí startovního pole rozumí půdorys startovního pole kolmo promítaný směrem vzhůru.
Robot musí dojet na konec dráhy dříve, než se začne vracet zpět ke startu a do cílového pole. Za dosažení konce dráhy bude považováno, pokud robot celým svým objemem překročí vyznačenou hranu pole pro otáčení a bude tak celým objemem v tomto poli. Nedodržení tohoto pravidla vede k diskvalifikaci v dané jízdě.
Robot je v 1. kole soutěže hodnocen na základě dosaženého času průjezdu celou drahou (kratší čas vítězí). Čas je měřen od okamžiku kdy robot protne startovní čáru vyznačenou na kraji startovního pole (ve směru jízdy). Měření času i jízda končí protnutím cílové čáry vyznačené na kraji cílového pole, který je první ve směru jízdy.
Jízda bude ukončena dříve pokud:
- Robot opustí dráhu a není schopen pokračovat bez pomoci
- Robot se dotkne svojí částí předmětu mimo dráhu (stůl apod.
- Robot se dotkne svojí částí lišty tvořící boční hranu základní laminátové desky
- Robot není bez pomoci schopen pokračovat v jízdě na dráze
- Převážený míček spadne z plošinky
- Převážený míček se dotkne jiné části robota, nebo jiného objektu, který není součástí horní plochy plošinky určené pro převážení míčku
- Při překročení definovaného maximálního času pro průjezd dráhou. Tento čas je stanoven na 3minuty
Pokud je jízda ukončena dříve než robot projede celou dráhu, bude zaznamenána ujetá vzdálenost. Vzdálenost je dána počtem segmentů (násobky 30cm), které robot celé přejel (celým objemem opustil segment – svisle promítaný půdorys). Roboti, kteří nedokončili celou jízdu, budou hodnoceni na základě ujeté vzdálenosti. Roboti, kteří jízdu dokončí, však budou vždy v pořadí před nimi
Soutěž 1.kolo
Každý z 24 týmů bude mít k dispozici jeden pokus o projetí tratě s tím, že se bude měřit čas projetí tratě ze startovního pole do pole pro možné otočení a zpět do cílového pole. V případě, že robot neprojede celou trať bude se mu počítat ujetá vzdálenost. Ujetá vzdálenost se určí jako počet projetých modulů dráhy x 30cm. Za projetý modul, lze považovat takový, který robot celým svým objemem již opustil. Po skončení 1. kola je nasazeno nejlepších 8 týmů podle času (eventuelně podle vzdálenosti) označených A1, A2 až A8 přímo do finálového pavouka.
Soutěž 2.kolo
Zbylých 16 týmů se utká ve vyřazovací jízdě (na jedno vítězství) o postup do finálového pavouka a to následovně – tým, který se umístil na 9 místě, pojede s týmem na 24 místě, tým na 10 místě s týmem na 23 místě atd. Ve vyřazovací jízdě vítězí robot týmu, který první projede trať ze startovního pole do pole pro možné otočení a zpět do cílového pole a jako první protne cílovou čáru, nebo ten z robotů, který urazí delší vzdálenost na trati (viz 1. kolo).
• 16 – 17 (B1)
• 15 – 18 (B2)
• 14 – 19 (B3)
• 13 – 20 (B4)
• 12 – 21 (B5)
• 11 – 22 (B6)
• 10 – 23 (B7)
• 9 – 24 (B8)
Vítězných 8 týmů označených B1, B2 až B8 postupuje do finálového pavouka k již nasazeným týmům A1, A2 až A8. V případě, že vzájemný souboj nerozhodne o postupujícím, bude následovat hod hrací kostkou, který rozhodne o vítězi (hozené vyšší číslo vyhrává, v případě rovnosti se hází opakovaně do rozhodnutí).
Po skončení druhého kola bude následovat 20 minutová přestávka.
FINÁLE ROBOSOUTĚŽE 2011 - VYŘAZOVACÍ ZPŮSOB
Znázornění celého finálového pavouka:
Obrázek

Osmifinále
Osmifinále bude představovat vyřazovací způsob na 2 vítězné jízdy. Po každé jízdě si soupeřící týmy prohodí tratě. Ve vyřazovací jízdě vítězí vždy ten robot týmu, který první projede trať ze startovního pole do pole pro možné otočení a zpět do cílového pole a jako první protne cílovou čáru, nebo ten z robotů, který urazí delší vzdálenost na trati (viz 1. kolo):.
• A1 – B1
• A2 – B2
• A3 - B3
• A4 - B4
• A5 – B5
• A6 – B6
• A7 – B7
• A8 – B8
(E je vítěz A1 – B1, F je vítěz A8 – B8, G je vítěz A5 – B5, H je vítěz A4 – B4, I je vítěz A3 – B3, J je vítěz A6 – B6, K je vítěz A7 – B7 a L je vítěz A2 – B2).
V případě, že ani 3 vzájemné souboje nerozhodnou o postupujícím, bude následovat hod hrací kostkou, který rozhodne o vítězi (hozené vyšší číslo vyhrává, v případě rovnosti se hází opakovaně do rozhodnutí).
Čtvrtfinále
Ve čtvrtfinále se utkají vítězné týmy z osmifinále opět vyřazovacím způsobem na 2 vítězné jízdy. Po každé jízdě si soupeřící týmy prohodí tratě. Ve vyřazovací jízdě vítězí vždy ten robot týmu, který první projede trať ze startovního pole do pole pro možné otočení a zpět do cílového pole a jako první protne cílovou čáru, nebo ten z robotů, který urazí delší vzdálenost na trati (viz 1. kolo):
• E (vítěz A1 – B1) – F (vítěz A8 – B8)
• G (vítěz A5 – B5) – H (vítěz A4 – B4)
• I (vítěz A3 – B3) – J (vítěz A6 – B6)
• K (vítěz A7 – B7) – L (vítěz A2 – B2)
(M je vítěz E – F, N je vítěz G – H, O je vítěz I – J a P je vítěz K – L).
V případě, že ani 3 vzájemné souboje nerozhodnou o postupujícím, bude následovat hod hrací kostkou, který rozhodne o vítězi (hozené vyšší číslo vyhrává, v případě rovnosti se hází opakovaně do rozhodnutí).
Celkové pořadí na 5 až 8 místě bude stanoveno postupně podle následujících kritérií:
- Podle času dosaženého v 1. kole
- Podle ujeté vzdálenosti v 1. kole
- Hodem hrací kostkou (hozené vyšší číslo vyhrává, v případě rovnosti se hází opakovaně do rozhodnutí)
Semifinále
V semifinále se utkají vítězné týmy ze čtvrtfinále opět vyřazovacím způsobem na 2 vítězné jízdy. Po každé jízdě si soupeřící týmy prohodí tratě. Ve vyřazovací jízdě vítězí vždy ten robot týmu, který první projede trať ze startovního pole do pole pro možné otočení a zpět do cílového pole a jako první protne cílovou čáru, nebo ten z robotů, který urazí delší vzdálenost na trati (počítá se počet bezchybně projetých modulů x 30cm):
M - N
O - P
(Q - vítěz M - N, R - vítěz O - P, S - poražený M - N, T - poražený O - P).
V případě, že ani 3 vzájemné souboje nerozhodnou o postupujícím, budou následovat dva hody hrací kostkou (vyšší součet bodů ze dvou hodů znamená vítězství). V případě rovnosti se hází do rozhodnutí vždy po jednom hodu.
Finálové zápasy
V boji o třetí místo se utkají poražené týmy ze semifinále opět vyřazovacím způsobem na 2 vítězné jízdy. Mezi jednotlivými souboji bude pauza 2 minuty. Každý tým může navíc jednou během pauzy mezi souboji o třetí místo požádat o technický oddechový čas v trvání 3 minut. Ve vyřazovací jízdě vítězí vždy ten robot týmu, který první projede trať ze startovního pole do pole pro možné otočení a zpět do cílového pole a jako první protne cílovou čáru, nebo ten z robotů, který urazí delší vzdálenost na trati (viz 1. kolo):
S - T
Ve finále se utkají vítězné týmy ze semifinále opět vyřazovacím způsobem na 2 vítězné jízdy. Mezi jednotlivými souboji bude pauza 2 minuty. Každý tým může navíc jednou během pauzy mezi souboji ve finále požádat o technický oddechový čas v trvání 3 minut. Ve vyřazovací jízdě vítězí vždy ten robot týmu, který první projede trať ze startovního pole do pole pro možné otočení a zpět do cílového pole a jako první protne cílovou čáru, nebo ten z robotů, který urazí delší vzdálenost na trati (počítá se počet bezchybně projetých modulů x 30cm):
Q - R
V případě, že ani 3 vzájemné souboje nerozhodnou o vítězi, budou následovat dva hody hrací kostkou (vyšší součet bodů ze dvou hodů znamená vítězství). V případě rovnosti se hází do rozhodnutí vždy po jednom hodu.
Obecná ustanovení
Pokud není uvedeno jinak, vede porušení kteréhokoliv z uvedených pravidel k diskvalifikaci robota v dané jízdě. V zápisu bude uvedeno, ž e v dané jízdě ujel 0 metrů. O dodržení pravidel a diskvalifikaci rozhoduje vyučující dohlížející na průběh soutěže.
Oficiální protest libovolného týmu proti porušení pravidel lze vznést před zahájením vlastní jízdy nebo do 1 minuty po jeho řádném skončení. Na pozdější protesty nebude brán zřetel!
Řešení úlohy
Možné napojení plošinky k robotu je k dispozici v návodu na sestavení.
Příklady řešení